command_sender.h File Reference
#include <type_traits>#include <utility>#include <ros/ros.h>#include <rm_msgs/ChassisCmd.h>#include <rm_msgs/ChassisActiveSusCmd.h>#include <rm_msgs/GimbalCmd.h>#include <rm_msgs/ShootCmd.h>#include <rm_msgs/ShootBeforehandCmd.h>#include <rm_msgs/GimbalDesError.h>#include <rm_msgs/StateCmd.h>#include <rm_msgs/TrackData.h>#include <rm_msgs/GameRobotHp.h>#include <rm_msgs/StatusChangeRequest.h>#include <rm_msgs/ShootData.h>#include <rm_msgs/LegCmd.h>#include <geometry_msgs/TwistStamped.h>#include <sensor_msgs/JointState.h>#include <nav_msgs/Odometry.h>#include <std_msgs/UInt8.h>#include <std_msgs/Float64.h>#include <rm_msgs/MultiDofCmd.h>#include <std_msgs/String.h>#include <std_msgs/Bool.h>#include <control_msgs/JointControllerState.h>#include <std_msgs/Float32.h>#include "rm_common/ros_utilities.h"#include "rm_common/decision/heat_limit.h"#include "rm_common/decision/power_limit.h"#include "rm_common/linear_interpolation.h"#include "rm_common/filters/filters.h"
Include dependency graph for command_sender.h:

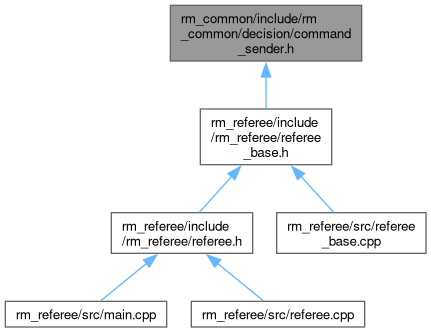
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | rm_common |
Generated by