#include <referee.h>
◆ Referee()
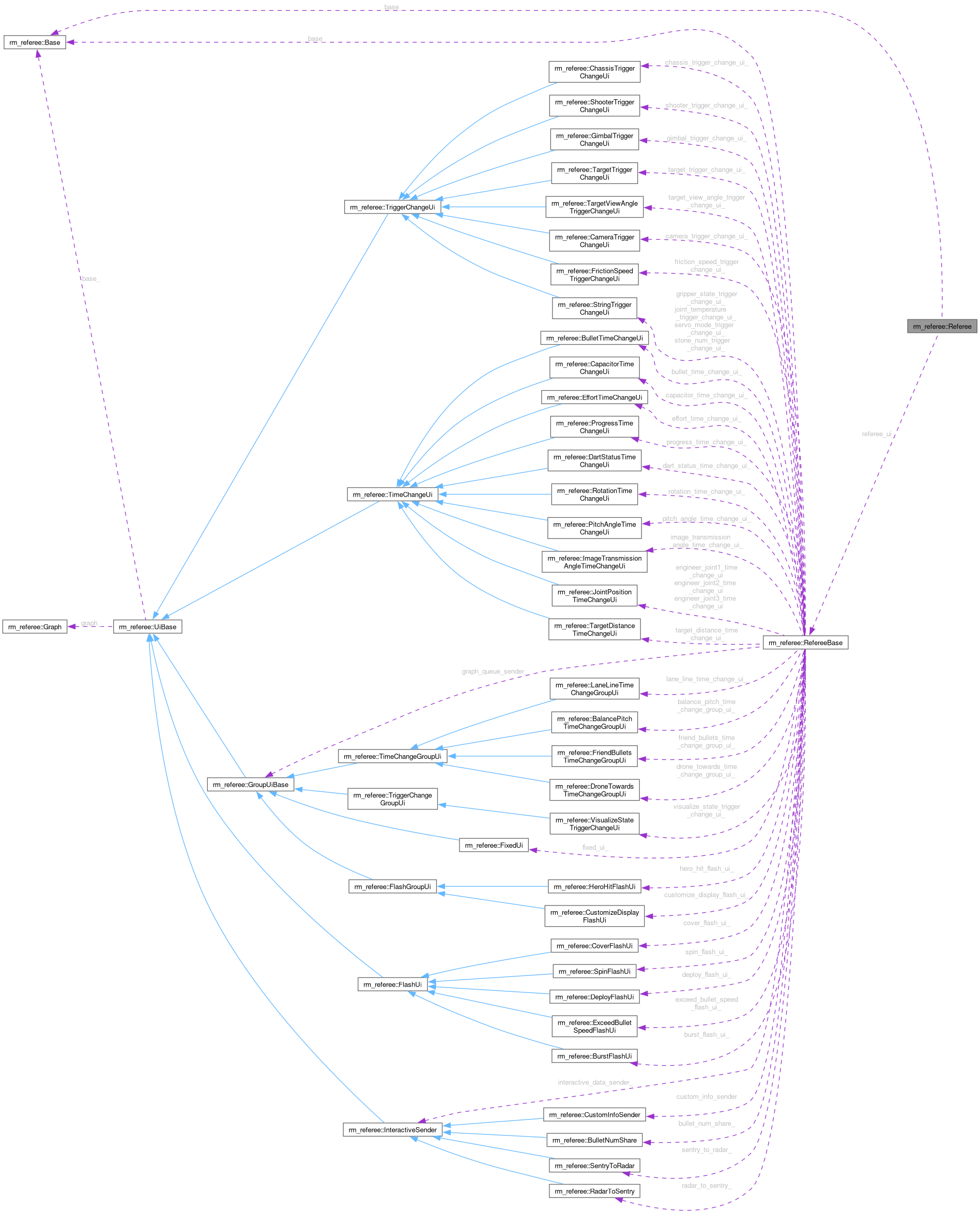
| rm_referee::Referee::Referee |
( |
ros::NodeHandle & | nh | ) |
|
|
inline |
◆ clearRxBuffer()
| void rm_referee::Referee::clearRxBuffer |
( |
| ) |
|
|
inline |
◆ read()
| void rm_referee::Referee::read |
( |
| ) |
|
◆ base_
| Base rm_referee::Referee::base_ |
◆ buff_pub_
| ros::Publisher rm_referee::Referee::buff_pub_ |
◆ bullet_allowance_pub_
| ros::Publisher rm_referee::Referee::bullet_allowance_pub_ |
◆ client_map_receive_pub_
| ros::Publisher rm_referee::Referee::client_map_receive_pub_ |
◆ client_map_send_data_pub_
| ros::Publisher rm_referee::Referee::client_map_send_data_pub_ |
◆ dart_client_cmd_pub_
| ros::Publisher rm_referee::Referee::dart_client_cmd_pub_ |
◆ dart_info_pub_
| ros::Publisher rm_referee::Referee::dart_info_pub_ |
◆ dart_status_pub_
| ros::Publisher rm_referee::Referee::dart_status_pub_ |
◆ event_data_pub_
| ros::Publisher rm_referee::Referee::event_data_pub_ |
◆ game_robot_hp_pub_
| ros::Publisher rm_referee::Referee::game_robot_hp_pub_ |
◆ game_robot_pos_pub_
| ros::Publisher rm_referee::Referee::game_robot_pos_pub_ |
◆ game_robot_status_pub_
| ros::Publisher rm_referee::Referee::game_robot_status_pub_ |
◆ game_status_pub_
| ros::Publisher rm_referee::Referee::game_status_pub_ |
◆ icra_buff_debuff_zone_status_pub_
| ros::Publisher rm_referee::Referee::icra_buff_debuff_zone_status_pub_ |
◆ power_heat_data_pub_
| ros::Publisher rm_referee::Referee::power_heat_data_pub_ |
◆ power_management_initialization_exception_pub_
| ros::Publisher rm_referee::Referee::power_management_initialization_exception_pub_ |
◆ power_management_process_stack_overflow_pub_
| ros::Publisher rm_referee::Referee::power_management_process_stack_overflow_pub_ |
◆ power_management_sample_and_status_data_pub_
| ros::Publisher rm_referee::Referee::power_management_sample_and_status_data_pub_ |
◆ power_management_system_exception_data_
| ros::Publisher rm_referee::Referee::power_management_system_exception_data_ |
◆ power_management_unknown_exception_pub_
| ros::Publisher rm_referee::Referee::power_management_unknown_exception_pub_ |
◆ radar_info_pub_
| ros::Publisher rm_referee::Referee::radar_info_pub_ |
◆ radar_mark_pub_
| ros::Publisher rm_referee::Referee::radar_mark_pub_ |
◆ radar_to_sentry_pub_
| ros::Publisher rm_referee::Referee::radar_to_sentry_pub_ |
◆ radar_wireless_enemy_call_sign_pub_
| ros::Publisher rm_referee::Referee::radar_wireless_enemy_call_sign_pub_ |
◆ radar_wireless_enemy_coin_and_field_status_pub_
| ros::Publisher rm_referee::Referee::radar_wireless_enemy_coin_and_field_status_pub_ |
◆ radar_wireless_enemy_projectile_allowance_pub_
| ros::Publisher rm_referee::Referee::radar_wireless_enemy_projectile_allowance_pub_ |
◆ radar_wireless_enemy_robot_buff_pub_
| ros::Publisher rm_referee::Referee::radar_wireless_enemy_robot_buff_pub_ |
◆ radar_wireless_enemy_robot_hp_pub_
| ros::Publisher rm_referee::Referee::radar_wireless_enemy_robot_hp_pub_ |
◆ radar_wireless_enemy_robot_pos_pub_
| ros::Publisher rm_referee::Referee::radar_wireless_enemy_robot_pos_pub_ |
◆ referee_ui_
◆ rfid_status_pub_
| ros::Publisher rm_referee::Referee::rfid_status_pub_ |
◆ robot_hurt_pub_
| ros::Publisher rm_referee::Referee::robot_hurt_pub_ |
◆ robots_position_pub_
| ros::Publisher rm_referee::Referee::robots_position_pub_ |
◆ rx_buffer_
| std::vector<uint8_t> rm_referee::Referee::rx_buffer_ |
◆ rx_len_
| int rm_referee::Referee::rx_len_ |
◆ sentry_info_pub_
| ros::Publisher rm_referee::Referee::sentry_info_pub_ |
◆ sentry_to_radar_pub_
| ros::Publisher rm_referee::Referee::sentry_to_radar_pub_ |
◆ shoot_data_pub_
| ros::Publisher rm_referee::Referee::shoot_data_pub_ |
◆ supply_projectile_action_pub_
| ros::Publisher rm_referee::Referee::supply_projectile_action_pub_ |
The documentation for this class was generated from the following files: